发布日期:2023-02-06 浏览量:1
字号:大 中 小
【成果介绍】
变频调速系统作为主要的电能动力设备,是工业生产、交通运输、新能源、国防装备等领域的关键设备之一。其中,电力电子变换器是电池、电网等能量源与驱动电机之间必不可少的能量传输纽带,是变频调速系统最核心的组成部件。
【痛点问题】
电力电子变换器中使用了大量的功率器件,承担了稳定电压、控制电流开通和关断等影响系统性能和功能的关键作用,这些功率器件由于电压、电流、机械安装等应力和高温、潮湿等外部环境作用下,本身易损坏易老化,其安全隐患极易引起整个系统崩溃,造成严重后果。
本技术针对冗余容错技术体积、重量、成本高的缺点,提出了一系列低成本容错技术,当功率器件发生故障时,通过熔断器将故障桥臂隔离,同时切换到匹配的容错模式,实现电力电子变换器的有效容错,具体如下:(1)接电容中心点容错技术
针对接电容中心点的容错拓扑(图1)存在电容电压漂移、控制自由度下降的技术难题,提出了基于有限集模型预测的容错控制方法,建立了容错拓扑和电机的离散化数学模型、电容电压与开关函数的数学模型,设计了电机控制目标函数以及电容电压漂移抑制目标函数,实现了电机的有效控制与电容电压漂移抑制。
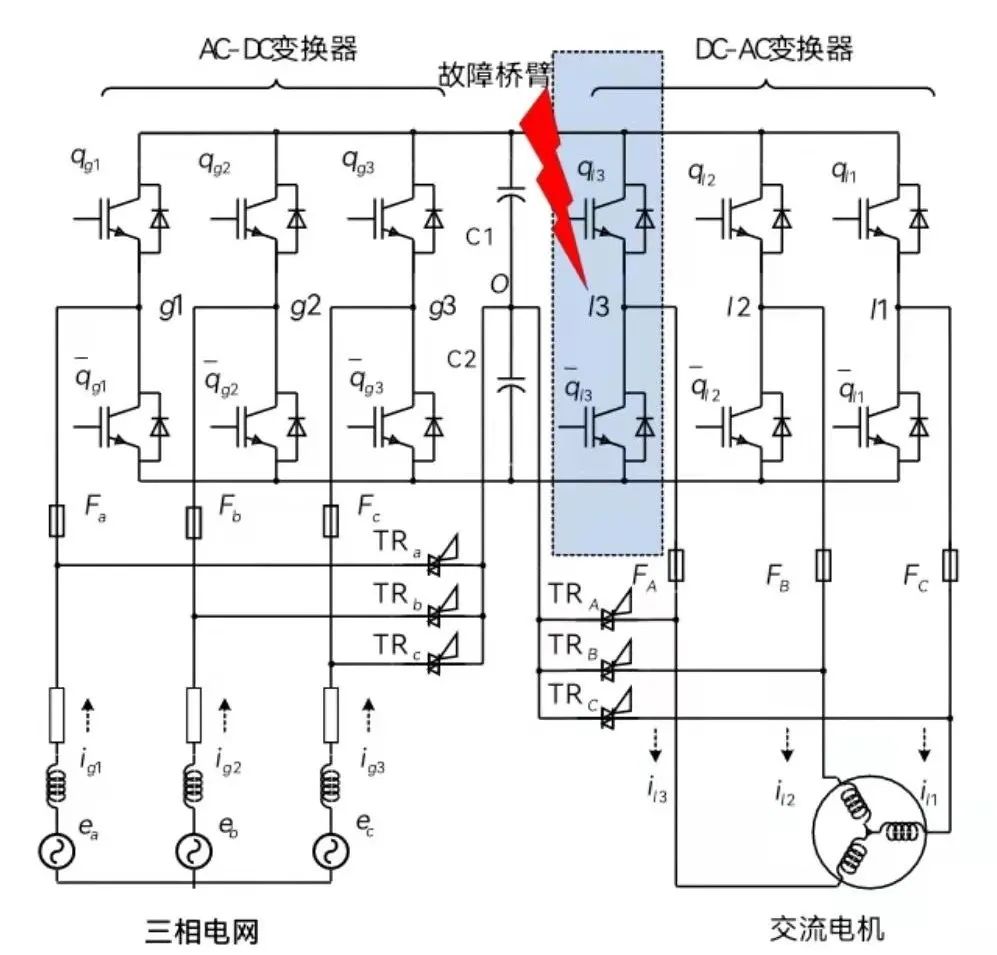
图1 接电容中心点容错拓扑
(2)共享桥臂容错技术
针对共享桥臂容错拓扑(图2)控制存在整流和逆变系统的强耦合、控制自由度下降、电压矢量决策冲突、共享桥臂电流限制、电压分配约束等技术挑战,提出了基于有限集模型预测的容错控制技术,建立了整流系统的有功功率和无功功率预测模型、逆变系统的磁链和转矩模型,提出了整流逆变一体化控制方案,实现了共享桥臂容错拓扑的有效控制。
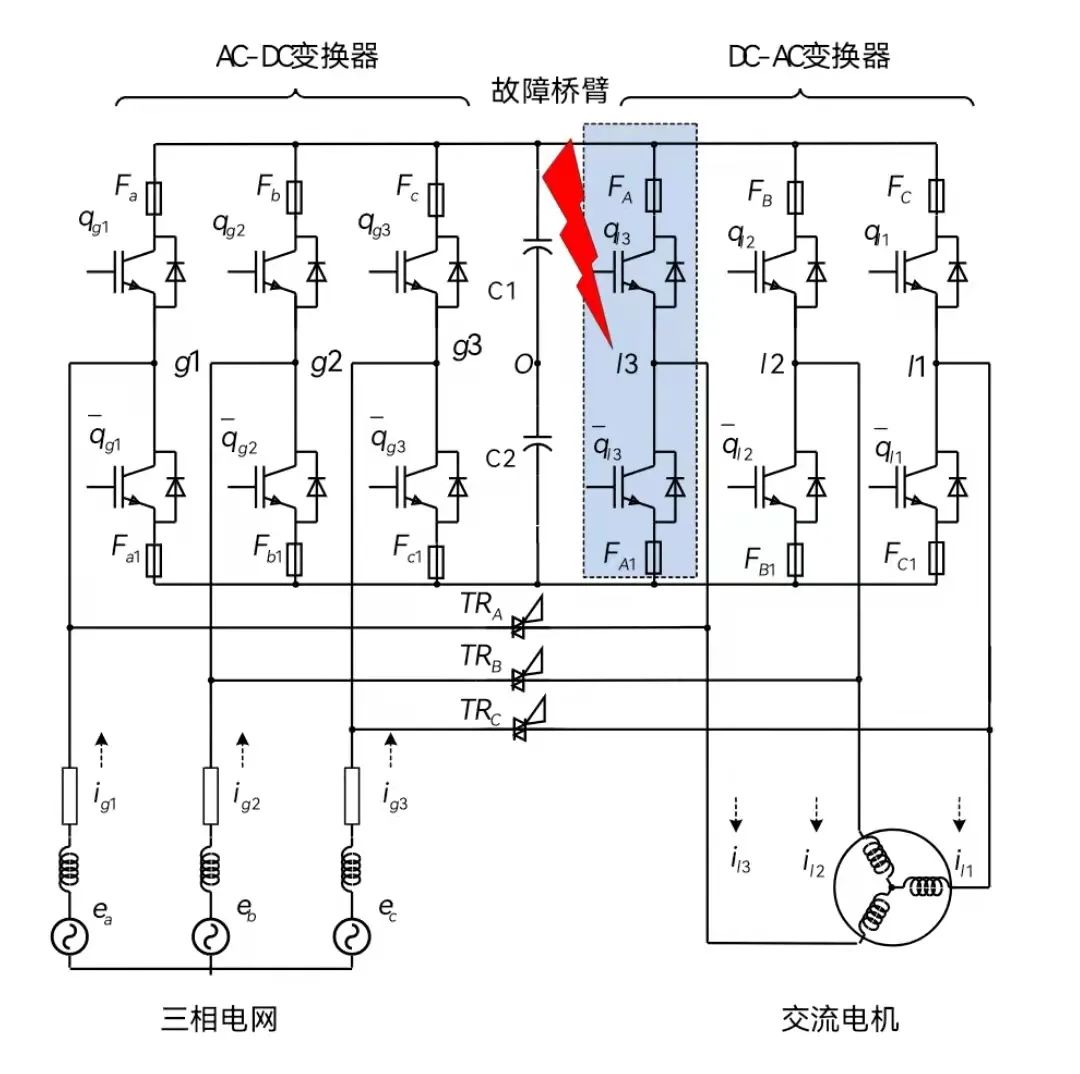
图2 共享桥臂容错技术
(3)面向两桥臂故障和继发故障的容错技术
为实现系统在突发故障或继发故障后出现的双桥臂故障容错,发明了四桥臂容错拓扑(图3)。针对继发故障,提出了多级容错策略:单桥臂故障下实现第一级容错,拓扑选择接电容中心点或共享桥臂,继发性故障下实现第二级容错,切换至四桥臂容错拓扑,在前两级容错失效的情况下,系统进入预警保护,确保不产生严重后果。四桥臂容错拓扑的控制同时存在接电容中心点与共享桥臂容错拓扑的技术挑战,构建了四桥臂功率变换器的离散化数学模型,设计了基于有限集模型预测的容错控制方法,实现了整流和逆变系统的一体化协调控制。
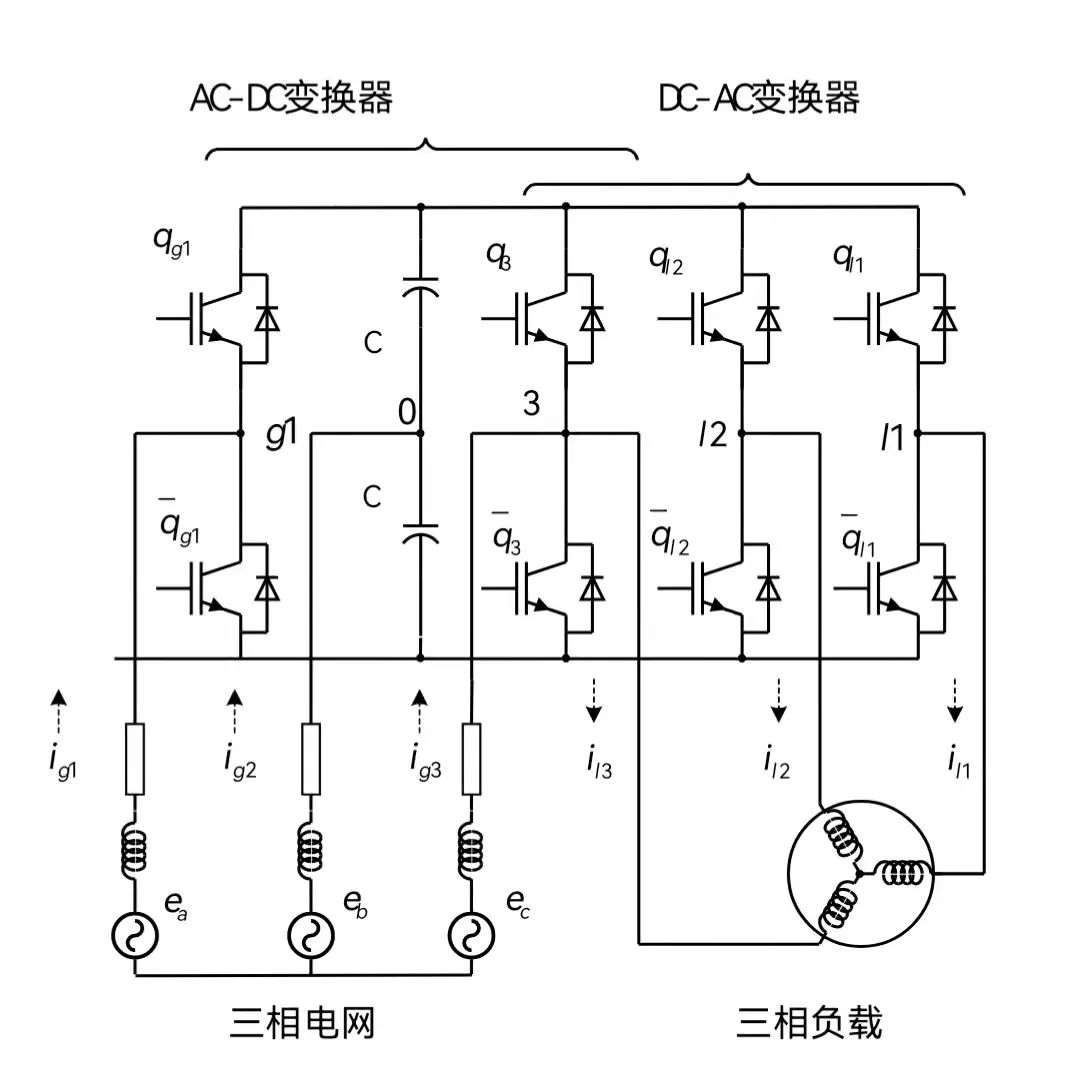
图3 四桥臂容错拓扑
(4)嵌入式的容错技术
故障发生后,系统快速平滑切换到相应的容错模式,是容错控制技术应用于工程实践的关键。嵌入故障诊断与容错方案于一体(图4),系统发生故障后通过实时诊断结果完成功率变换器硬件重构与控制软件重构,进入容错状态,建立故障前后一致的电压矢量模型、开关组合模型,将容错控制算法嵌入到正常控制算法中,解决了容错前后的平滑切换问题。基于此,研制了首款容错电机驱动器,其功率变换器具有容错功能。
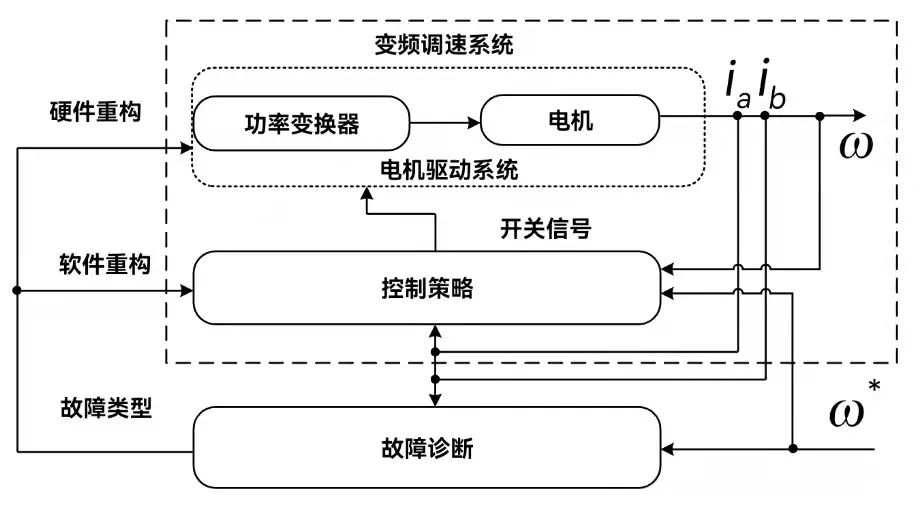
图4 嵌入式容错控制系统示意图
【技术优势】
(1)大大降低了容错成本:相比于传统的冗余容错控制,添加少量切换开关的体积、重量、成本远远小于额外备份一套变换器,在某些对设备体积、重量、成本有着严格要求的应用场合中具有显著优势。
(2)极大提高了系统可靠性:在实际容错系统中可以采用多级容错方式,在故障发生后系统进入一级容错状态,此时采用传统冗余容错;如果系统继续发生故障,则进入二级容错状态,采用上述容错技术,可以极大地提高系统的可靠性。
【应用实例】
研制的容错电机驱动器(图5)被应用于华中科技大学人工智能与自动化学院的HUSTER-12型无人艇电动推进系统中。故障容错运行下电机最高转速为3000转/分(正常时可达6000转/分),船速为5节,可实现正常调速,动态特性无明显下滑,确保无人艇的可靠返回。
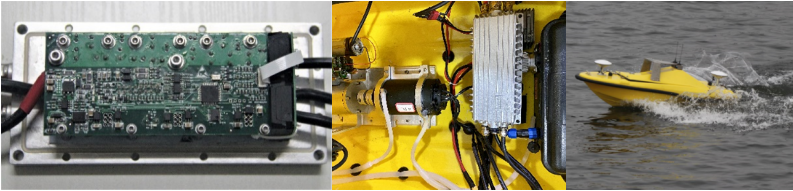
图5 无人艇推进系统容错电机驱动
【应用场景】
工业生产、交通运输、新能源、国防装备。
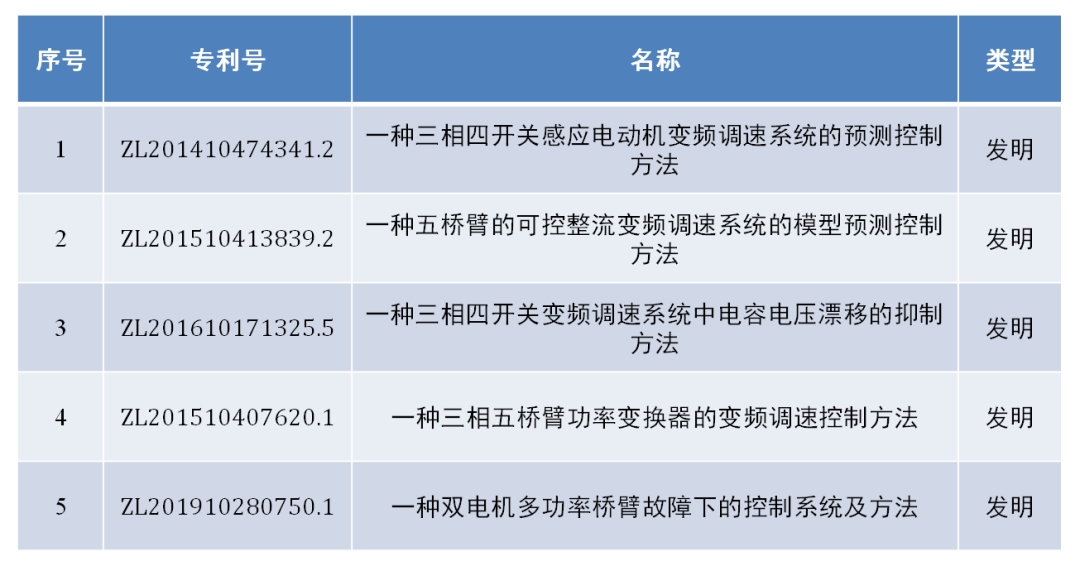
【知识产权】





 网站首页
网站首页
 协会概况
协会概况 政策速递
政策速递 会员风采
会员风采 党建工作
党建工作 人才智库
人才智库 网站地图
网站地图