发布日期:2023-02-01 浏览量:1
字号:大 中 小
【成果介绍】
磁悬浮轴承是利用电磁力实现转子无接触支撑的新型支撑设备,对于高转速和高精度的场合,磁悬浮轴承在旋转机械中得到了广泛应用。在磁悬浮轴承系统中,电力电子控制器用于控制磁轴承线圈电流,从而产生用于悬浮的电磁力是重要组成部分之一。
现有技术的痛点问题:目前在此领域广泛使用的电力电子变换器存在使用器件较多的不足之处,从而带来体积大、成本高等缺点,不利于系统的集成化。对于多轴磁悬浮轴承,存在较大的优化空间。另外,磁悬浮轴承中电力电子器件是最易失效的部件之一,威胁磁悬浮轴承的运行可靠性。如果在高速旋转过程中出现器件失效,将造成严重后果。
本技术成果针对现有磁悬浮轴承控制器器件数量大的缺点,提出了一系列新型的电力电子功率变换器:
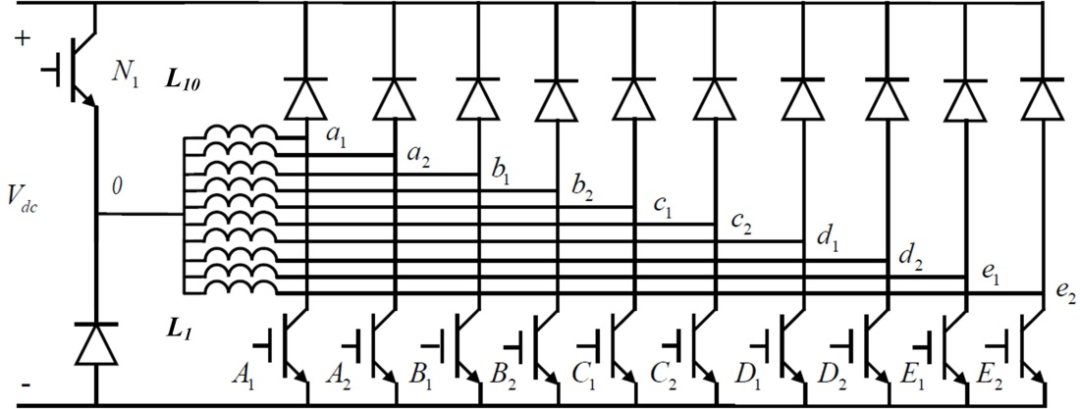
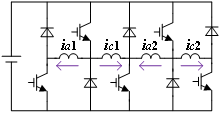
共用桥臂磁悬浮轴承控制器
首先通过共用桥臂的方法减少了对功率器件数量的需求,满足工业上实际应用的需求。目前已应用在磁悬浮压缩机一体机中,使得新型控制器与传统控制器相比体积成本大大降低,实现了系统的高度集成化。共桥臂磁悬浮轴承控制器如图1所示。所有绕组共用一个公共桥臂,实现器件数量的减小。
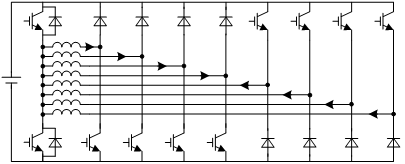
反向共桥臂电力电子控制器
进一步的,针对多轴共桥臂磁悬浮轴承电力电子控制器中公共桥臂需要承受各绕组电流之和,带来电流应力大和损耗大的问题,发明了反向共桥臂电力电子控制器,如图2所示。将一半的绕组电流反向,这样公共桥臂电流之和是一半正向电流和一半反向电流之和,大大降低电流应力和损耗。
反向共桥臂电力电子控制器
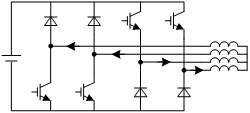
进一步的,在磁悬浮轴承一个平面的两轴中,利用每一轴两个绕组电流之和等于两倍直流偏置的原理,发明了多轴无共桥臂电力电子控制器,如图3所示。在这种结构中,两轴的各两个绕组电流之和相等,方向相反,可以进一步省去共桥臂而直接采用Y接法。
串联绕组磁悬浮轴承电力电子控制器
另外,针对多轴磁悬浮轴承采用共桥臂控制器电压利用率只有直流母线电压一半的缺点,发明了串联绕组磁悬浮轴承电力电子控制器,如图4所示。在N轴磁悬浮轴承2N个绕组中,采用2N+1个半桥桥臂顺序串联,可以控制每个绕组最大电压达到全直流母线电压,从而提高电流环带宽。
磁悬浮轴承容错型控制器
另一方面,针对磁悬浮轴承电力电子器件开路失效故障,发明了一系列的磁悬浮轴承容错型控制器。以单轴为例,如图5所示,采用一个三相全桥功率模块接入单轴磁轴承两个绕组,可以工作在电流流入中间桥臂和流出中间桥臂两个模式。因为磁悬浮轴承的电磁力与电流方向无关,两种模式均能实现悬浮控制。设置其中一种工作模式为正常模式,检测出故障后立刻切换到第二种备用模式,就能保持磁悬浮轴承在器件开路故障下继续稳定悬浮。图5是单轴磁轴承控制器的一种容错模式,之前图1-图4的每种拓扑结构都可以类似的设计对应的容错控制器。
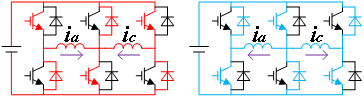
图5 磁悬浮轴承容错型电力电子控制器(单轴为例)
(1)大大减少对电力电子器件数量、门极驱动信号数量上的需求。
以常见的五自由度磁轴承系统为例:在磁悬浮轴承电力电子控制器上,目前工业界已有的磁悬浮轴承产品多采用单向H桥拓扑结构,共需使用20个二极管以及20个开关器件。拓扑优化后,最新报道中的拓扑结构共需要使用15个二极管及开15个开关器件。而采用本技术图1的多轴共桥臂拓扑结构,仅需使用11个二极管以及11个开关器件,与广泛采用的单向H桥拓扑相比节省了45%的电力电子器件及其相应的驱动电路,从成本及体积上可以得到很大的优化,有利于系统的集成与一体化。
(2)变换器总体功率损耗大幅度下降。
采用图2的多轴反向共桥臂控制器,在图1的基础上可以实现共桥臂的电流应力显著下降,变换器总体功率损耗下降可以超过50%。
(3)省去公共桥臂。
采用图3的无共桥臂控制器,两组两轴径向磁轴承可以省去公共桥臂。
(4)实现电流环带宽的显著增加。
采用图4的串联绕组磁悬浮轴承控制器,总体需要也是11个二极管和11个开关器件,但是相对多轴共桥臂电力电子控制器,每个绕组的电压利率用可以增加1倍,从而实现电流环带宽显著的增加。
(5)提高系统的可靠性。
采用容错型电力电子控制器,在以上各个拓扑结构上采用全桥桥臂代替半桥桥臂,可以直接采用市场上最常见的模块实现。在容错控制器的控制方法下,可以应对运行中电力电子器件因为键合线疲劳脱落或者门极驱动掉电等造成的开路故障,快速切换到容错模式,继续保持悬浮。这一容错功能可以在高转速下实现,改善了系统的可靠性。
【应用实例】
与该技术直接相关产品为中车时代电气的磁悬浮轴承压缩机,该产品的额定轴功率为120kW,转速为25000rpm,推力轴承负载达3000Nm,轴振动抑制在30um以内。目前该系列的产品性能稳定,相比国外进口产品性价比更高,市场占有率在稳步提升。

【应用领域】
航空航天高速旋转机械设备、电力飞轮储能系统、建筑制冷用离心式压缩机、高端装备用旋转装置等。





 网站首页
网站首页
 协会概况
协会概况 政策速递
政策速递 会员风采
会员风采 党建工作
党建工作 人才智库
人才智库 网站地图
网站地图