


新一代智能AGV关键技术
发布日期:2023-02-25 浏览量:1
字号:大 中 小
【AGV用途】
市面上的AGV搬运机器人主要集中应用在制造业物料搬运方面,AGV在制造业应用中以其高效、准确、灵活地完成物料的搬运任务而著称。同时,它可以多台AGV组成柔性的物流搬运系统,搬运路线可以随着生产工艺流程的调整而及时调整,使一条生产线上能够制造出十几种产品,大大提高了生产的柔性和企业的竞争力。AGV作为基础搬运工具,AGV的应用深入到机械加工、家电生产、微电子制造、卷烟等多个行业,生产加工领域成为AGV应用最广泛的领域,它是柔性制造的基础工具。
【科技创新】
01改进的激光SLAM导航定位技术
国内某公司AGV产品负重1500kg的重复定位精度在±10mm,国外某知名AGV产品负重1500kg时精度前进重复定位精度在±5mm,横行停止精度在±10mm。本项目通过改进粒子群进化算法对粒子波的运动模型采样粒子进行优化,改善粒子滤波算法的退化现象,提高SLAM算法的定位精度。
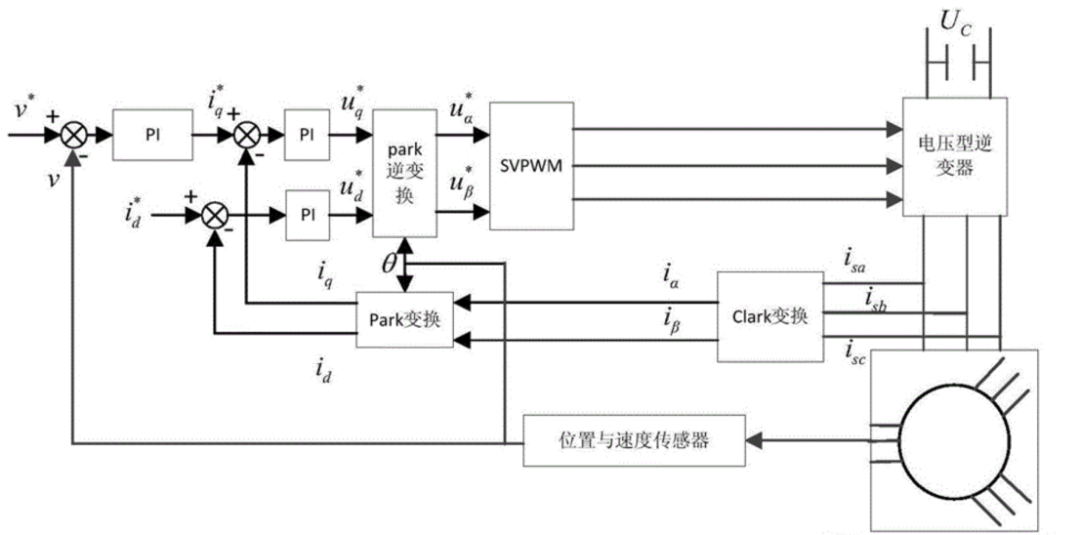
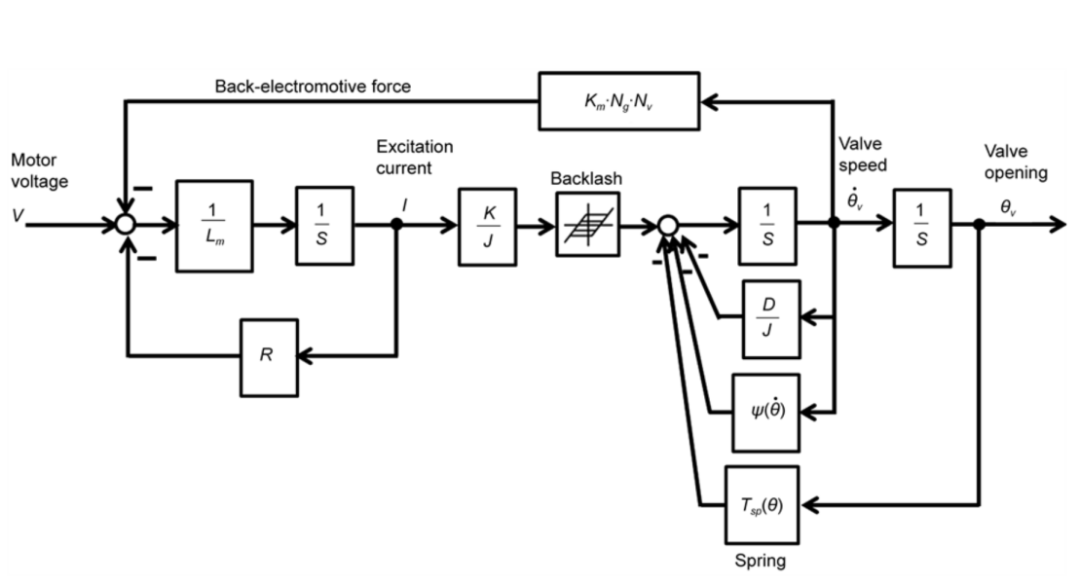
02 改进的电机驱动器控制技术
针对现有的电机驱动控制中存在舵轮速度波动率较高且电机的重复定位精度较高等问题,提出微分前馈终端滑模控制策略,速度环采用自适应模糊控制方法,提高速度环抑制速度波动能力,在位置环加入快速终端滑模控制,提高舵轮位置控制精度。
03 改进轨迹追踪算法研究
针对现有AGV轨迹跟踪速度慢,跟踪精度不高等问题,提出一种Back-stepping的控制算法结合Lyapunov设计控制器,提高鲁棒性和跟踪的精确性最终实现AGV整车重复定位精度的目标。
基于的Kafka架构来实现AGV集群系统的调度功能,其具有分布式、支持分区、多副本等特点,最大优点就是可以实时处理大量数据满足需求场景。该项目提出的改进遗传算法,能有效降低系统的负载量标准差,其数值下降63.58%。该算法有助于缓解实际生产区域内严重拥堵现象。提出利用表面微织构、二维材料添加剂等方法,解决液体超滑受速度、压力和温度等因素的限制,建立高速、重载等情况下的固液耦合超滑体系。解释超滑界面形成、演化和时效机制,建立固液耦合超滑的物理模型,突破液体超滑的压力极限。以此解决舵轮中关键部件摩擦磨损问题,提高舵轮精度和稳定性。
05 改进人工蜂群调度任务分配算法技术
在AGV的调度更新策略中,利用其线性更新维数机制加快搜索过程。AGV在活动区域的行驶路径单一导致拥堵。关键技术是引入“基于图论搜索算法和均衡负载与强化学习的多AGV路径规划算法的技术”。通过该算法,获取高密度AGV调度路径规划问题的最优解。
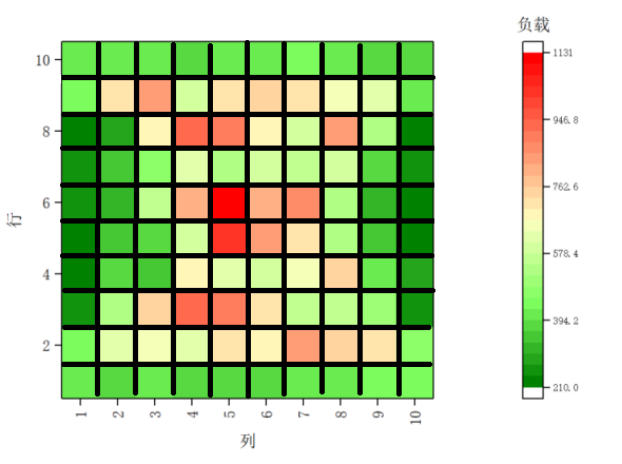
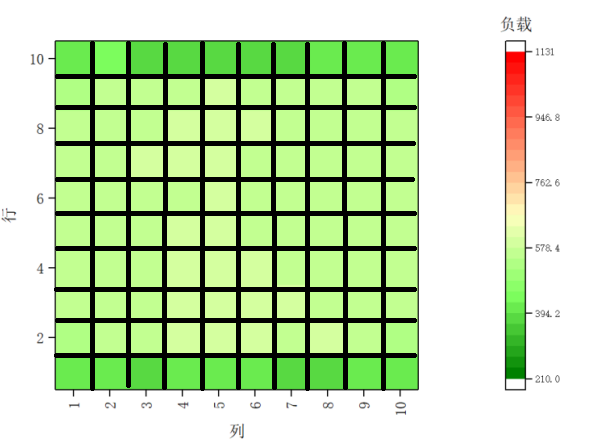
区域内拥堵情况对比图:
上图为正常A*路径规划的拥堵情况
下图是基于图论算法优化后的
IABC提升调度规模自适应性、提高调度效率对比图:

图为普通ABC(蜂群算法)任务分配效率图

图是IABC(智能蜂群)任务分配效率图
【应用价值】
汽车行业对AGV应用领域需求巨大。AGV在汽车行业的典型应用主要在于发动机装配线,或者底盘和平台的对接。比如:原材料的自动运输、总装线的运输、测试区的往来运输以及生产车间与成品之间的自动运输。无论是从使用量还是应用成熟度,汽车行业无疑是AGV最强大的市场和最大的支持力量。
一个汽车企业往往要使用数百台甚至上千台AGV,如东风日产广州花都工厂就使用了超过1000台AGV。从目前国内汽车制造厂商的数据来看,大多数汽车企业都采用了国产的AGV作为厂内生产物流的一个流通硬件,国产化率较高。因此,需要大力发展国产智能AGV调度系统,满足生产需求。